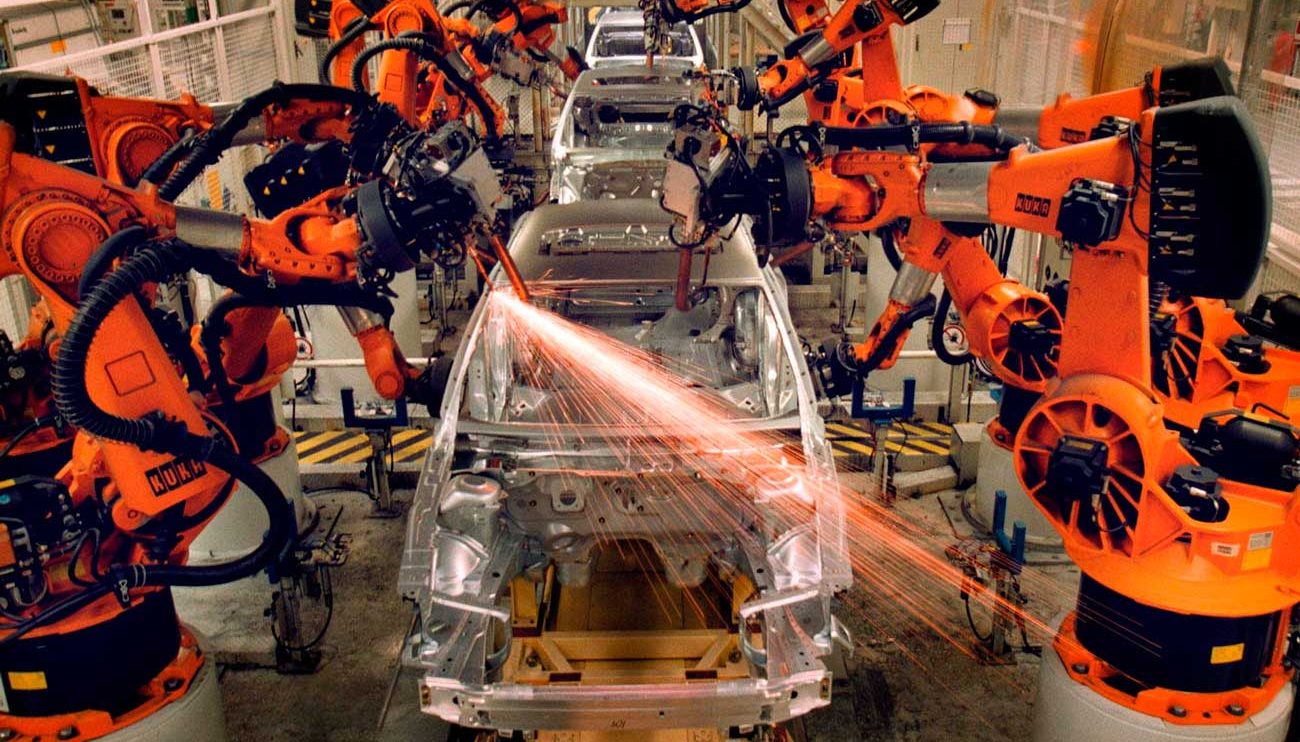
Robótica situada:
Este enfoque se ocupa de los robots que están insertos en entornos complejos y, a menudo, dinámicamente cambiantes. Se basa sobre dos ideas centrales: los robots Los robots "están corporizados" (embodiment), es decir, tienen un cuerpo físico apto para experimentar su entorno de manera directa, en donde sus acciones tienen Una realimentación inmediata sobre sus propias percepciones. Los robots "está situados" (situatedness), o sea, están inmersos dentro de un entorno; interaccionan con el mundo, el cual influye –de forma directa– sobre su comportamiento. Obviamente, la complejidad del entorno tiene una relación estrecha con la complejidad del sistema de control. En efecto, si el robot tiene que reaccionar rápida e inteligentemente en un ambiente dinámico y desafiante, el problema del control se torna muy difícil.

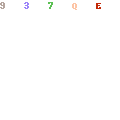
Robótica Basada:
En la Conducta o el Comportamiento. Este acercamiento emplea el principio conductista: los robots generan un comportamiento sólo cuando se los estimula; es decir, reaccionan ante los cambios de su entorno local (como cuando alguien toca accidentalmente un objeto caliente). Aquí, el diseñador divide las tareas en numerosas y diferentes comportamientos básicos, cada una de los cuales se ejecuta en una capa separada del sistema de control del robot. Los sistemas basados en la conducta son capaces de reaccionar en tiempo real, ya que calculan las acciones directamente a partir de las percepciones (a través de un conjunto de reglas de correspondencia situación acción). Es importante observar que el número de capas aumenta con la complejidad del problema.

Robótica Cognitiva:
Esta aproximación utiliza técnicas provenientes del campo de las Ciencias Cognitivas. Se ocupa de implementar robots que perciben, razonan y actúan en entornos dinámicos, desconocidos e imprevisibles. Para eso, deben poseen un modelo simbólico e interno de su entorno local, y la suficiente capacidad de razonamiento lógico para tomar decisiones y para ejecutar las tareas necesarias a fin de alcanzar sus objetivos. Si se consigue que los robots desarrollen por sí mismos sus capacidades cognitivas, se evitaría el programarlos "a mano" para cada tarea o contingencia concebible.
Robótica de Desarrollo o Epigenética:
Este enfoque se caracteriza porque trata de implementar sistemas de control de propósito general, a través de un prolongado proceso de desarrollo u auto organización autónoma. Como resultado de la interacción con su entorno, el robot es capaz de desarrollar diferentes –y cada vez más complejas– capacidades perceptuales, cognitivas y de comportamiento. Se trata de un área de investigación que integra la neuroconciencia del desarrollo, la psicología del desarrollo y la robótica situada. Inicialmente el sistema puede estar dotado de un pequeño conjunto de conductas o conocimientos innatos, pero –gracias a la experiencia adquirida– es capaz de crear representaciones y acciones más complejas.

Robótica Evolutiva:
Este acercamiento aplica los conocimientos obtenidos de las Ciencias Naturales (biología y etología) y de la Vida Artificial (redes neuronales, técnicas evolutivas y sistemas dinámicos) sobre robots reales, a fin de que desarrollen sus propias habilidades en interacción íntima con el entorno y sin la intervención humana. Mediante un diseño fijo, es difícil lograr que un robot se adapte (se auto organice) a un entorno dinámico que evoluciona –a menudo– mediante cambios caóticos, ya que la máquina puede adquirir automáticamente nuevos comportamientos dependiendo de las situaciones dinámicas que se presentan en el entorno en donde está situada.

Robótica Inspirada en la Biología:
Dado que los sistemas biológicos realizan muchas tareas de procesamiento complejas con máxima eficiencia, constituyen una buena referencia para implementar sistemas artificiales que ejecuten tareas que los seres vivos realizan de forma natural (interpretación de la información sensorial, aprendizaje de movimientos, coordinación motora, etc.). Aunque es posible obtener diferentes grados de "inspiración biológica" (desde una vaga semejanza hasta una aceptable réplica), el objetivo último es realizar máquinas y sistemas cada vez más similares al original.